2023年10月6日,云基智能机器人实验室针对服务机器人故障诊断的最新研究成果“Fault Diagnosis for Mobile Robots Based on Spatial–Temporal Graph Attention Network Under Imbalanced Data”被《IEEE Transactions on Instrumentation and Measurement》在线发表,根据2023年12月最新升级版检索,该期刊是故障诊断领域知名期刊,为JCR一区、中科院二区top期刊,影响因子为5.6。
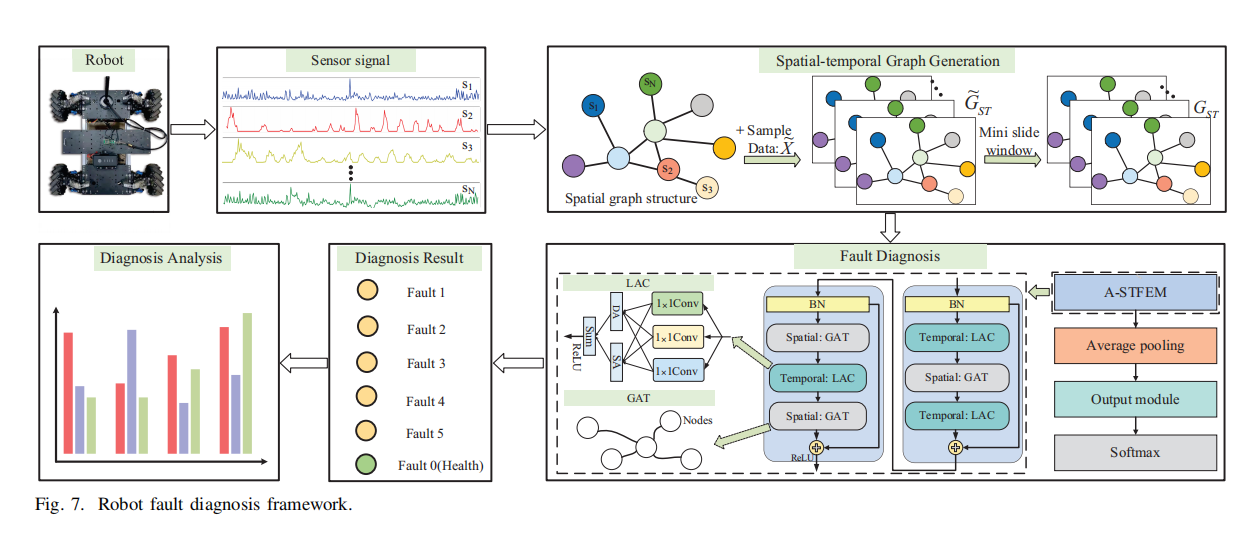
针对移动机器人故障数据的时空关联性特征提取问题,该项成果提出了一种新的时空图注意网络(STGATN),该网络具有三个主要特征: 1)基于机器人多传感器数据构建特征增强时空图;2)设计基于注意的时空特征提取模块(A-STFEM)来挖掘多传感器之间的时空相关信息;3)建立调节交叉熵损失函数,增强不平衡数据场景下模型的泛化性。通过对一个轮式移动机器人进行故障诊断实验,我们验证了STGATN的有效性,结果表明,STGATN能够实img现良好的诊断性能和泛化性。